Nhóm làm việc về hệ thống robot mới


Nhiều công ty quy mô vừa, dù trong ngành thực phẩm, ngành đóng gói hay các nhà cung cấp thiết bị điện tử, đang ngày càng chuyển sang sử dụng các ứng dụng có sự hỗ trợ của robot (chọn & đặt). Tuy nhiên, nếu nhìn vào thực tế triển khai, có một số thách thức cần vượt qua. Điều này là do mỗi nhà sản xuất robot ngày nay đều mang theo thế giới tự động hóa của riêng mình, bao gồm phần cứng và phần mềm, bí quyết lập trình cụ thể, giao diện, bộ điều khiển, thiết bị vận hành, hệ thống kỹ thuật, v.v.
Dây chuyền sản xuất thường được điều khiển bởi một PLC và người dùng lập trình ứng dụng dây chuyền sản xuất thông qua hệ thống lập trình của PLC. Nếu một công ty muốn tích hợp một robot vào một quy trình cấp cao hơn, hầu hết được điều khiển bằng PLC, thì điều này thường rất tẻ nhạt. Kỹ thuật và vận hành nói riêng có liên quan đến mức độ phức tạp cao và rất nhiều nỗ lực. Đầu tiên, bản thân giao diện phải được xác định, tiếp theo là chương trình PLC, và sau đó chương trình phải được tích hợp trên bộ điều khiển robot. Định nghĩa của các giao diện không được tiêu chuẩn hóa và do đó phải được tạo lại nhiều lần. Công việc này tốn nhiều thời gian và không phải là trọng tâm của người dùng.
Đổi mới không nên chậm lại
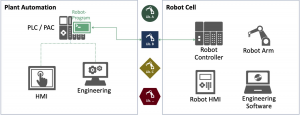

Vấn đề trong hình minh hoạ: Các thư viện khác nhau cho rô bốt của các nhà sản xuất khác nhau làm cho việc tích hợp trở nên cực kỳ mất thời gian.
Ngay cả trong quá trình vận hành sau này, khối lượng công việc vẫn cao: mỗi lần bảo trì hệ thống, mỗi lần cập nhật, tích hợp một loại rô bốt khác nhau hoặc thậm chí một nhà sản xuất mới đều đòi hỏi một lượng công việc dồi dào. Để làm cho vấn đề tồi tệ hơn, các chuyên gia robot rất ít và xa. Do đó, công việc như vậy thường được thuê ngoài cho các nhà tích hợp hệ thống, do đó đồng nghĩa với công sức và chi phí. Do đó, người sử dụng robot công nghiệp thường phải quyết định sớm về loại robot và nhà sản xuất mà họ muốn đầu tư công sức. Các giải pháp mới sáng tạo do đó ít được sử dụng hơn.
Giao diện thống nhất cho rô bốt
Vì lý do này, người dùng từ lâu đã mong muốn có thể điều khiển và lập trình thống nhất các hệ thống robot hoàn chỉnh của các nhà sản xuất khác nhau được tích hợp trong một dây chuyền sản xuất thông qua hệ thống lập trình PLC.
Các nhà sản xuất robot hàng đầu như: ABB, Comau, Epson, Fanuc, Jaka, Kawasaki, Kuka, Nachi, Panasonic, Stäubli, TM Robot, Yamaha, Yaskawa – đã hợp tác theo sáng kiến của Siemens để phát triển một giải pháp. Điều này có nghĩa là khoảng 70% các nhà sản xuất robot trên thế giới đã tham gia. Phải mất hai năm để tìm ra và phát triển khái niệm, một khái niệm không có gì là tầm thường. Rốt cuộc, kỹ thuật và hệ thống thời gian chạy trong các robot tương ứng đã được tung ra thị trường từ nhiều thập kỷ trước trong một số trường hợp và đã liên tục được phát triển trong những năm này. Để đưa ra một ví dụ: Các chuyển động giống nhau hiện được biểu diễn khá khác nhau trong kỹ thuật.
Công việc chung đã được đền đáp! Giờ đây, một giao diện dữ liệu thống nhất giữa PLC và bộ điều khiển rô bốt đã được xác định để giúp lập trình rô bốt thống nhất – và do đó hiệu quả hơn – cho các nhà lập trình PLC và nhà cung cấp PLC. Thông qua giao diện dữ liệu này, các chương trình robot có thể được viết hoàn toàn trong PLC bằng cách gọi các chức năng của robot và báo cáo lại thông tin trạng thái robot cần thiết cho PLC. Việc phát triển, xây dựng và duy trì giao diện dữ liệu mới được đặt trong tay PI. Để phát triển cấu hình rô bốt mới này, PI đã thành lập một nhóm làm việc “Hệ thống rô bốt” mới và đưa ra “Giao diện lệnh rô bốt tiêu chuẩn”.


Hình minh hoạ giải pháp: Một thư viện độc lập với nhà sản xuất có nghĩa là lập trình robot trực tiếp trong PLC
Giao diện dữ liệu này trước tiên sẽ được ánh xạ tới PROFINET, vì PROFINET đã chứng tỏ bản thân trong nhiều ứng dụng trong nhiều năm, cả về phía nhà sản xuất robot và phía nhà sản xuất PLC.
Về phía robot, các lệnh được chuyển đổi thành môi trường / ngôn ngữ lập trình cục bộ thông qua giao diện thống nhất (trình thông dịch). Về phía PLC, các mẫu hoặc lệnh cấp cao hơn cũng có thể được tạo kết hợp một số hành động trên giao diện dữ liệu.
Một thư viện rô bốt duy nhất
Như trong các công nghệ khác, sẽ có các cấp hoặc lớp khác nhau trong giao diện robot. Đầu tiên, sẽ có một tập hợp các chức năng được xác định, cần thiết cho tất cả và cho các chức năng đơn giản. Sau đó, các chức năng cấp cao hơn có thể được thêm vào dưới dạng một tùy chọn. Trọng tâm vẫn là xử lý các chức năng, ví dụ: chọn và đặt các ứng dụng. Các chức năng như chế độ chạy bộ, hướng dẫn các điểm đường dẫn, tạo và xác nhận cấu hình chuyển động và thay đổi dữ liệu cấu hình được cung cấp cho mục đích này. Tuy nhiên, trong tương lai, nó được lên kế hoạch tích hợp các ứng dụng khác, chẳng hạn như ứng dụng của robot hàn.
Giờ đây, nhà sản xuất PLC chỉ cần một thư viện rô bốt duy nhất chứa các khối chức năng để lập trình rô bốt từ các nhà sản xuất khác nhau. Nhà sản xuất robot cũng chỉ cần triển khai một trình thông dịch duy nhất cho việc điều khiển robot của mình. Việc lập trình được thực hiện hoàn toàn bởi các chuyên gia tự động hóa PLC.
Người dùng và nhà sản xuất tin rằng điều này sẽ làm giảm đáng kể sự phức tạp của dịch vụ và bảo trì trong các ứng dụng dựa trên robot.

